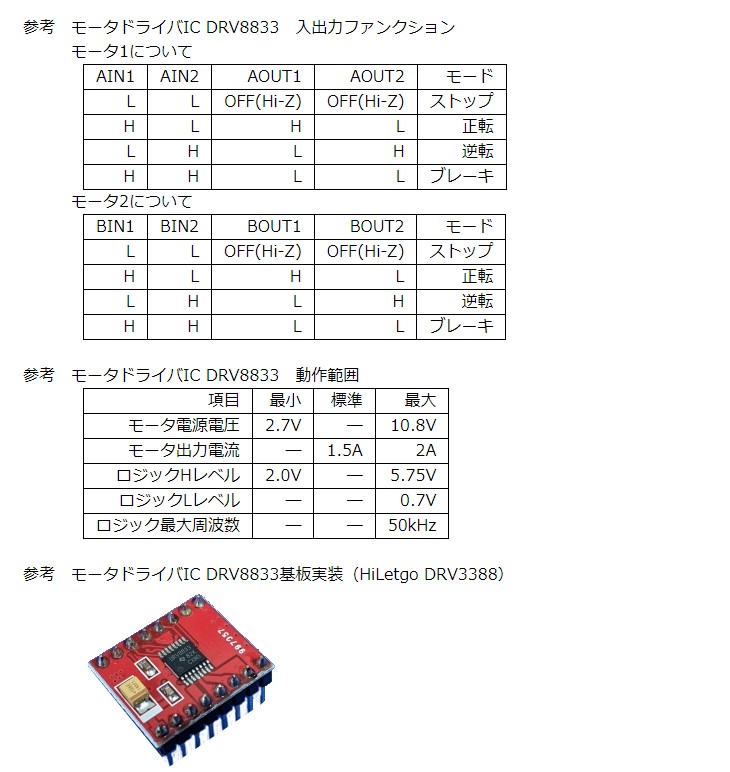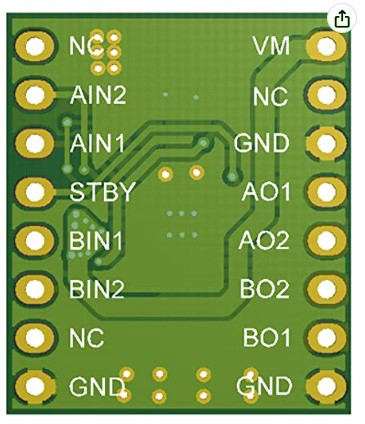
AIN1とAIN2へラズベリーパイピコから、信号を送るとそれに対応してAO1とAO2に出力されます。
ここで、AIN1と2は、制御信号です。AO1と2は、モーター送られる出力です。
見てのとおり、AとBの2つのモータを制御できます。
下記は、AとBのモータに、信号を送っています、仮にVを1000としますと。
下記は、soukou.pyプログラムの19行目の関数です。
”線に乗りました。” の時に 下記が実行。
def right(v,v2):
IN1.duty_u16(v)
IN2.duty_u16(v)
IN3.duty_u16(v)
IN4.duty_u16(0)
上記は、IN1とIN2が、H となりIN3がHとなり、IN4がLとなります。
下記の制御ファンクションから、モータAは、STOP モータBが、正転
ですので、今回の接続では、B(上から見て左側のモータ)だけが
回転して車は右へ曲がります。